Управление шаговым двигателем
Напишем программу для управления шаговым двигателем.
STEP вход будем подключать к fast output 3, а DIR к fast output 4.
Из основной программы CoDeSys будем задавать количество импульсов, частоту их следования.
Если у вас открыта среда Hardella IDE, то можете либо
![]() открыть код примера в среде, либо создать свой проект на основе примера (
открыть код примера в среде, либо создать свой проект на основе примера (File > New > Project > Step motors).
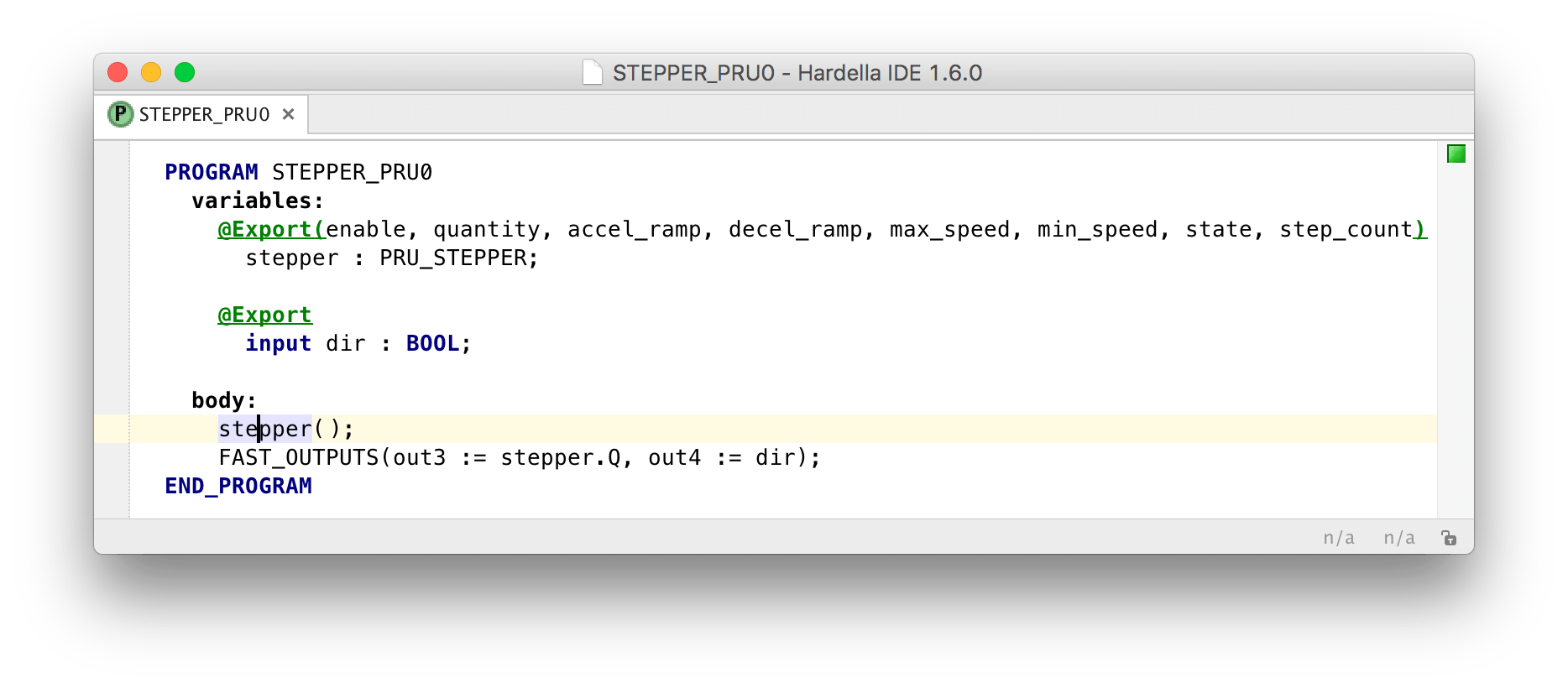
Код довольно простой, так как тут лишь вызов встроенного блока управления ШД и запись выходов.
@Export перед объявлением переменной dir означает, что эта переменная будет напрямую передаваться из CoDeSys в PRU (с точки зрения PRU это input переменная)
А @Export перед объявлением ФБ PRU_STEPPER означает, что часть переменных этого ФБ будут обмениваться с основным циклом ПЛК.
Далее происходит запись значений в быстрые выходы.
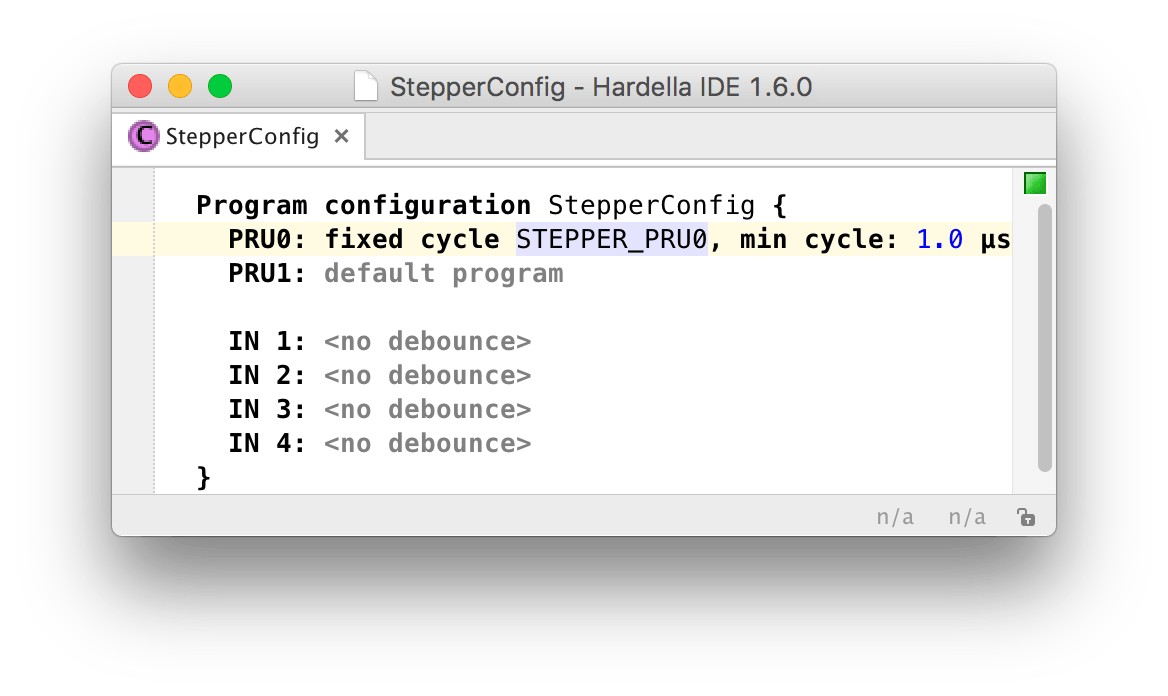
Аналогично можно составить программу для PRU1 и управлять вторым шаговым двигателем на выходах fast output 1 и fast output 2.
Укажем длительность цикла PRU 1 мкс.
Скомпилируем программу, загрузим в CoDeSys, и посмотрим что получилось.
Опишем запуск ШД на стороне КДС (перед использованием Pru0 программ нужно залить PRU0.prg в ПЛК, PRU1.prg – не обязательно):
SteppersConfig_Pru0Init(); (* загрузка кода в PRU0 *)
(* PRU запущены, можно обмениваться данными *)
SteppersConfig_Pru0MemoryRead(); (* читаем данные из PRU0 *)
(* Выполняем логику программы *)
SteppersConfig_Pru0MemoryWrite.STEPPER_PRU0_stepper_enable :=
SteppersConfig_Pru0MemoryRead.STEPPER_PRU0_stepper_state <> STOP_STEPPER_RUN_STATE;
(* Записываем данные в PRU0 *)
SteppersConfig_Pru0MemoryWrite(
STEPPER_PRU0_dir := TRUE,
STEPPER_PRU0_stepper_accel_ramp := 100,
STEPPER_PRU0_stepper_decel_ramp := 100,
STEPPER_PRU0_stepper_max_speed := 30,
STEPPER_PRU0_stepper_min_speed := 0,
STEPPER_PRU0_stepper_quantity := 100
);
quantity, шт – количество генерируемых импульсовmin_speed, Гц – начальная частота импульсов ШДmax_speed, Гц – максимальная частота импульсов ШДaccel_ramp,decel_rampГц/сек – ускорение при разгоне/торможении.enable– команда на запуск
Стоит учесть, что после отработки нужного количества импульсов ШД останавливается (импульсы прекращаются). А enable по-прежнему TRUE. Возникает вопрос: как узнать, что импульсы сгенерированы, и можно запускать заново?
Ответ на этот вопрос даёт выходной параметр state. В процессе работы, этот параметр принимает значения INIT (стоим, настройка параметров), ACCEL (разгон), RUN (движение на максимальной скорости), DECEL (замедление), STOP (движение завершено).
Следующее движение начнётся только после сброса enable. Т.е. чтобы запустить ШД второй раз, нужно передёрнуть enable.
Поэтому команда enable := state <> STOP по факту и организует «вечный запуск ШД», а небольшие частоты (30 Гц) позволяют глазами увидеть, что «импульсы идут».
При необходимости, аналогично запускается и второй ШД (при использовании PRU1 нужно заливать оба файла и PRU0.prg и PRU1.prg в ПЛК):
SteppersConfig_Pru1Init(); (* загрузка кода в PRU1 *)
(* PRU запущены, можно обмениваться данными *)
SteppersConfig_Pru1MemoryRead(); (* читаем данные из PRU1 *)
(* Выполняем логику программы *)
SteppersConfig_Pru1MemoryWrite.STEPPER_PRU1_stepper_enable :=
SteppersConfig_Pru1MemoryRead.STEPPER_PRU1_stepper_state <> STOP_STEPPER_RUN_STATE;
(* Записываем данные в PRU1 *)
SteppersConfig_Pru1MemoryWrite(
STEPPER_PRU1_dir := TRUE,
STEPPER_PRU1_stepper_accel_ramp := 100,
STEPPER_PRU1_stepper_decel_ramp := 100,
STEPPER_PRU1_stepper_max_speed := 30,
STEPPER_PRU1_stepper_min_speed := 0,
STEPPER_PRU1_stepper_quantity := 100
);
Комментировать