Step motor control
Let’s create a program to control step motor.
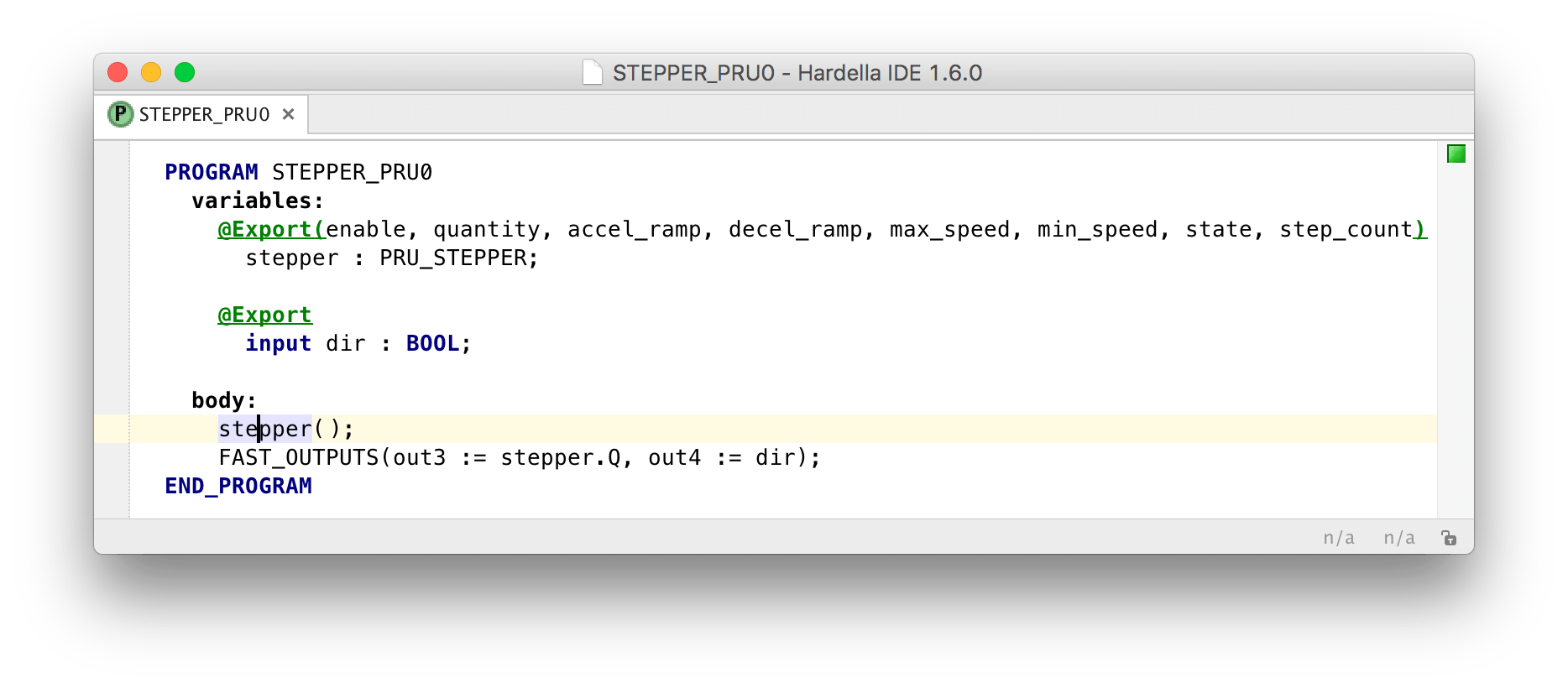
STEP input will be connected to fast output 3, and DIR will be connected to fast output 4.
The main CoDeSys program will specify the number of pulses and pulse frequency.
If you have Hardella IDE opened, you can either open
![]() code sample in the IDE, or you can create a new project with this code (
code sample in the IDE, or you can create a new project with this code (File > New > Project > Step motors).
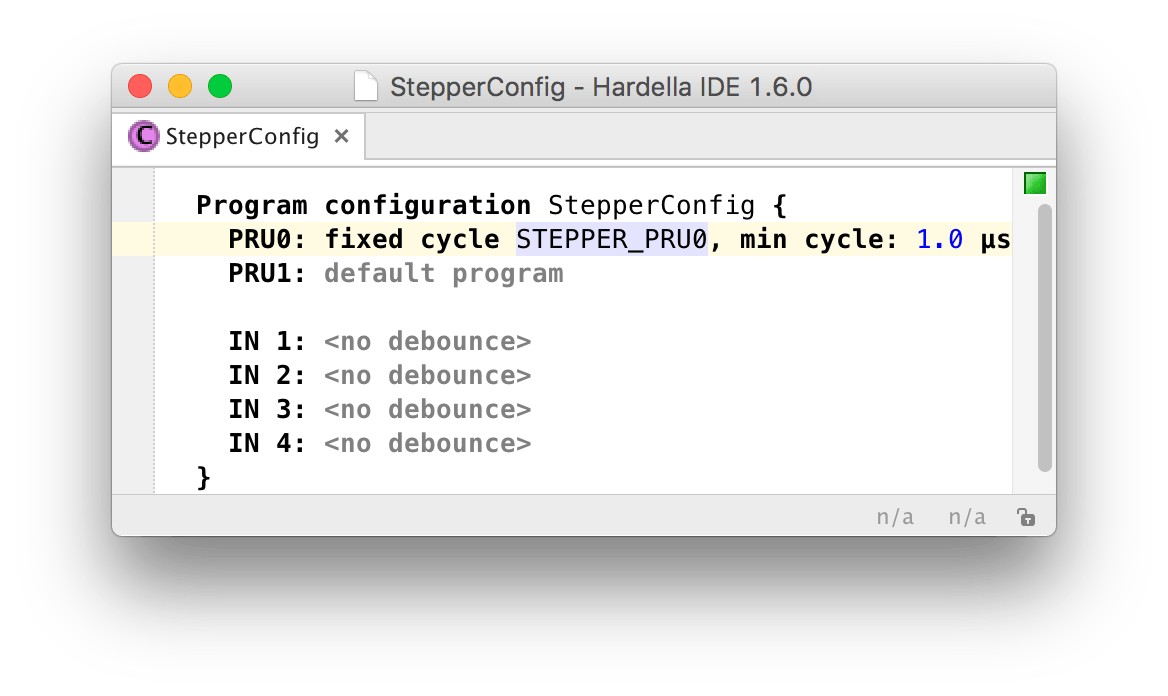
Let’s set PRU cycle length to be 1 µs.
We need to build the project and load it to CoDeSys. Let’s check what we have got so far.
Here’s how we would control the step motor from the CoDeSys program:
SteppersConfig_Pru0Init(); (* PRU0 initialization *)
(* PRU is up and running, now we can exchange the data *)
SteppersConfig_Pru0MemoryRead(); (* read data from PRU0 *)
(* Execute program logic *)
SteppersConfig_Pru0MemoryWrite.STEPPER_PRU0_stepper_enable :=
SteppersConfig_Pru0MemoryRead.STEPPER_PRU0_stepper_state <> STOP_STEPPER_RUN_STATE;
(* Write data to PRU0 *)
SteppersConfig_Pru0MemoryWrite(
STEPPER_PRU0_dir := TRUE,
STEPPER_PRU0_stepper_accel_ramp := 100,
STEPPER_PRU0_stepper_decel_ramp := 100,
STEPPER_PRU0_stepper_max_speed := 30,
STEPPER_PRU0_stepper_min_speed := 0,
STEPPER_PRU0_stepper_quantity := 100
);
quantity, – number of pulses to generatemin_speed, Hz – initial pulse frequencymax_speed, Hz – maximum pulse frequencyaccel_ramp,decel_rampHz/s – acceleration and decelerationenable– start flag
As all the pulses are generated, the step motor stops (no more pulses is generated). Note that enable is still TRUE. That’s the question: how do you know that all the pulses are generated and how do you know you can restart the stepper?
state parameter answers that question. That parameter takes the following values INIT (the step motor is stopped, parameters are being configured), ACCEL (acceleration), RUN (running at maximum speed), DECEL (deceleration), STOP (movement is complete).
The next move will happen only after enable is reset. That is you need to set enable=FALSE, then the subsequent enable=TRUE would start the next movement.
That is why enable := state <> STOP command would result in “evergreen step motor movement”, and low frequencies (like 30 Hz) enable to see the pulses via naked eye.
Leave a Comment